آدم جلانزمان
وفقا ل ورقة جديدة نُشر في مجلة Nature Communications. يمكن للنظام التقاط صور ملونة لأجسام مغمورة بعيدة ، حتى في البيئات المظلمة ، ونقل البيانات لاسلكيًا للمراقبة في الوقت الفعلي للبيئات تحت الماء ، أو المساعدة في اكتشاف الأنواع النادرة الجديدة ، أو مراقبة التيارات البحرية أو التلوث أو العمليات التجارية والعسكرية .
لدينا بالفعل مجموعة متنوعة من الأساليب لالتقاط الصور تحت الماء ، ولكن وفقًا للمؤلفين ، “لم تتم ملاحظة معظم الكائنات البحرية والمحيطية بعد.” ويرجع ذلك جزئيًا إلى أن معظم الأساليب الحالية تتطلب الربط بالسفن أو الطائرات بدون طيار تحت الماء أو محطات توليد الطاقة من أجل الطاقة والاتصالات. يجب أن تشتمل الطرق التي لا تستخدم اتصالاً على طاقة البطارية ، مما يحد من عمرها الافتراضي. في حين أنه من الممكن من حيث المبدأ تجميع الطاقة من أمواج المحيط أو التيارات تحت الماء أو حتى ضوء الشمس ، فإن إضافة المعدات اللازمة للقيام بذلك سيؤدي إلى وجود كاميرا تحت الماء أكبر بكثير وأكثر تكلفة.
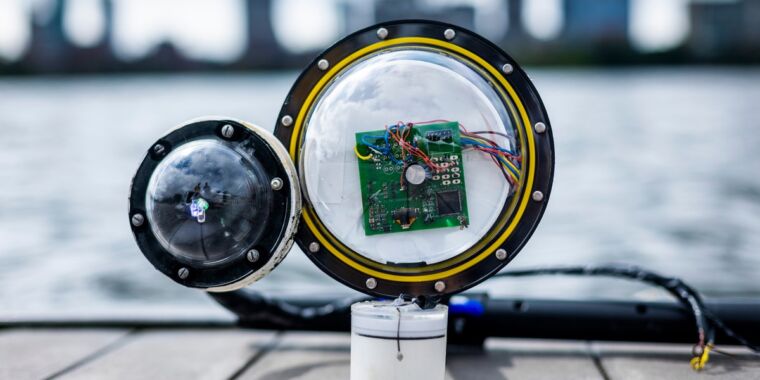
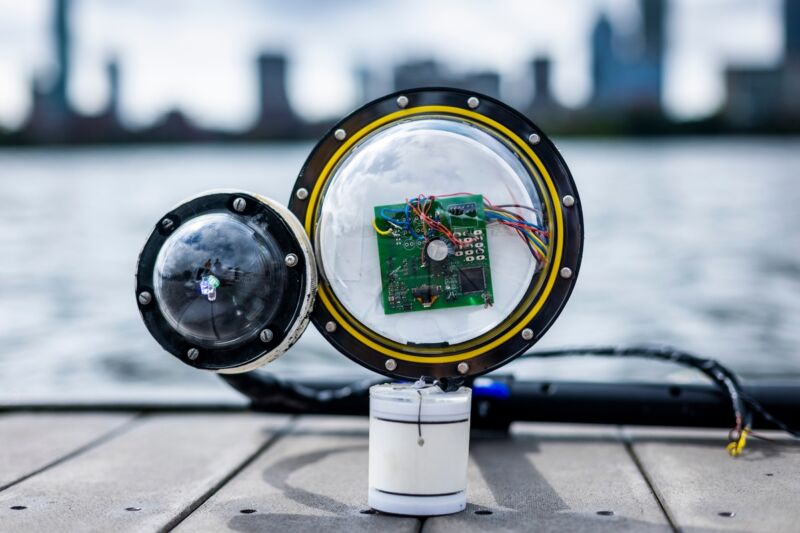
لذلك شرع فريق معهد ماساتشوستس للتكنولوجيا في تطوير حل لطريقة تصوير لاسلكية خالية من البطاريات. كان هدف التصميم هو تقليل الأجهزة المطلوبة قدر الإمكان. نظرًا لأنهم أرادوا الحفاظ على استهلاك الطاقة عند الحد الأدنى ، على سبيل المثال ، استخدم فريق معهد ماساتشوستس للتكنولوجيا مستشعرات تصوير غير مكلفة متاحة للاستخدام. والمفاضلة هي أن هذه المستشعرات تنتج فقط صورًا بتدرج الرمادي. احتاج الفريق أيضًا إلى تطوير فلاش منخفض الطاقة ، لأن معظم البيئات تحت الماء لا تحصل على الكثير من الضوء الطبيعي.
SS Afzal وآخرون ، 2022
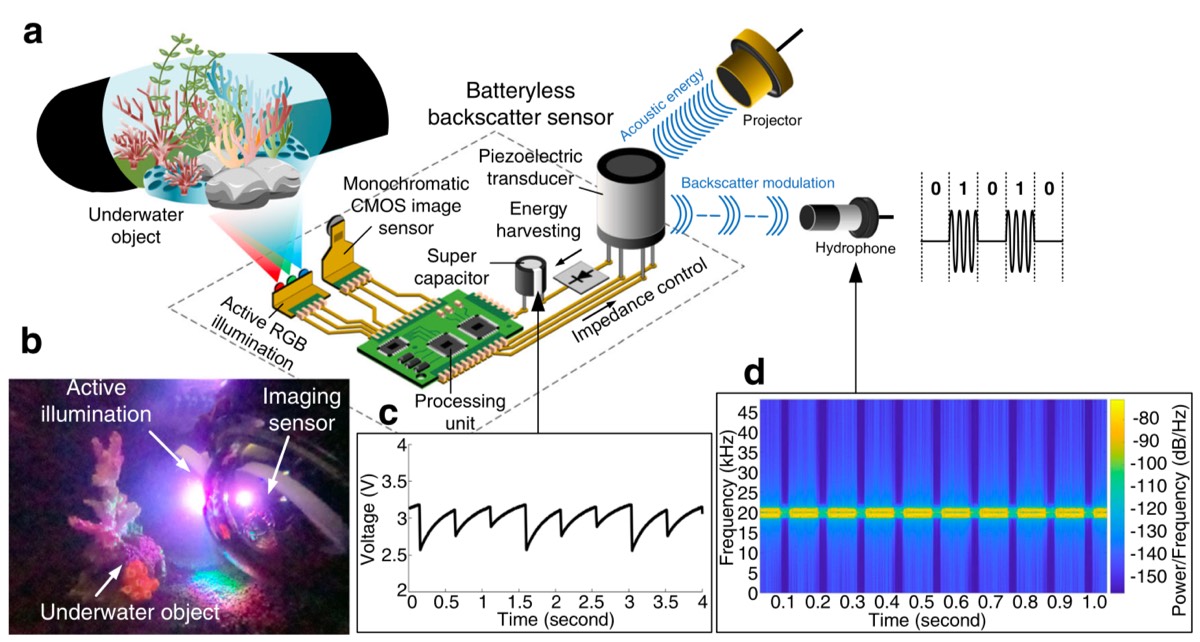
اتضح أن الحل لكلا التحديين هو دمج مصابيح LED باللون الأحمر والأخضر والأزرق. تستخدم الكاميرا مؤشر LED الأحمر للإضاءة في الموقع وتلتقط تلك الصورة بأجهزة الاستشعار الخاصة بها ، ثم تكرر العملية باستخدام مصابيح LED باللونين الأخضر والأزرق. قد تظهر الصورة بالأبيض والأسود ، وفقًا للمؤلفين ، لكن الألوان الثلاثة للضوء من مصابيح LED تنعكس في الجزء الأبيض من كل صورة. وبالتالي ، يمكن إعادة بناء صورة ملونة أثناء المعالجة اللاحقة.
“عندما كنا أطفالًا في فصل الفنون ، تعلمنا أنه يمكننا إنشاء أي لون باستخدام ثلاثة ألوان أساسية ،” قال المؤلف المشارك فاضل أديب. “نفس القواعد تنطبق على الصور الملونة التي نراها على أجهزة الكمبيوتر الخاصة بنا. نحتاج فقط إلى الأحمر والأخضر والأزرق ، تلك القنوات الثلاث ، لبناء صور ملونة.”
بدلاً من البطارية ، يعتمد المستشعر على التشتت الخلفي الصوتي البيزو من أجل اتصالات منخفضة الطاقة للغاية بعد تشفير بيانات الصورة إلى وحدات بت. لا تحتاج هذه الطريقة إلى توليد الإشارة الصوتية الخاصة بها (كما هو الحال مع السونار ، على سبيل المثال) ، وتعتمد بدلاً من ذلك على تعديل انعكاسات الأصوات الواقعة تحت الماء لنقل البيانات بتة واحدة في كل مرة. يتم التقاط هذه البيانات بواسطة جهاز استقبال بعيد قادر على استعادة الأنماط المعدلة ، ثم يتم استخدام المعلومات الثنائية لإعادة بناء الصورة. يقدر المؤلفون أن كاميرتهم تحت الماء أكثر كفاءة في استخدام الطاقة بحوالي 100 ألف مرة من نظيراتها ويمكن أن تعمل لأسابيع.
بطبيعة الحال ، بنى الفريق نموذجًا أوليًا لإثبات المفهوم وأجرى اختبارات لإثبات نجاح طريقتهم. على سبيل المثال ، تخيلوا التلوث (على شكل زجاجات بلاستيكية) في Keyser Pond في جنوب شرق نيو هامبشاير ، وكذلك نجم البحر الأفريقي (بروتوريستر لينكلي) في “بيئة خاضعة للرقابة مع إضاءة خارجية”. كانت دقة هذه الصورة الأخيرة جيدة بما يكفي لالتقاط الدرنات المختلفة على طول الأذرع الخمسة لنجم البحر.

SS. أفضل وآخرون ، 2022
تمكن الفريق أيضًا من استخدام الكاميرا اللاسلكية تحت الماء لمراقبة نمو نبات مائي (Aponogeton ulvaceus) على مدار عدة أيام ، واكتشاف وتحديد موقع المنارات المرئية التي غالبًا ما تستخدم للتتبع تحت الماء والتلاعب الآلي. حققت الكاميرا معدلات كشف عالية ودقة عالية للموقع تصل إلى مسافة حوالي 3.5 متر (حوالي 11.5 قدمًا) ؛ يقترح المؤلفون أنه يمكن تحقيق نطاقات اكتشاف أطول باستخدام مستشعرات عالية الدقة. تعد المسافة أيضًا عاملاً في حصاد الطاقة وقدرات الاتصال بالكاميرا ، وفقًا للاختبارات التي أجريت في نهر تشارلز في شرق ولاية ماساتشوستس. كما هو متوقع ، تقل كلتا هاتين الإمكانيات الحيوية مع المسافة ، على الرغم من أن الكاميرا تمكنت من نقل البيانات على بعد 40 مترًا (131 قدمًا) من جهاز الاستقبال.
باختصار ، “الطبيعة اللاسلكية وغير المكلفة والمتكاملة تمامًا لطريقتنا تجعلها نهجًا مرغوبًا فيه لعمليات النشر الضخمة في المحيط” ، كما كتب المؤلفون. يتطلب توسيع نطاق نهجهم محولات طاقة أكثر تطوراً وكفاءة ، فضلاً عن نقل صوتي عالي الطاقة تحت الماء. من الممكن أيضًا استخدام الشبكات الشبكية الحالية من العوامات الموجودة على سطح المحيط ، أو شبكات الروبوتات تحت الماء مثل عوامات Argo ، لتشغيل كاميرات تجميع الطاقة عن بُعد.
“أحد أكثر تطبيقات هذه الكاميرا إثارة بالنسبة لي شخصيًا هو في سياق مراقبة المناخ ،” يقول أديب. “نحن نبني نماذج مناخية ، لكننا نفتقر إلى البيانات الخاصة بأكثر من 95٪ من المحيط. يمكن أن تساعدنا هذه التكنولوجيا في بناء نماذج مناخية أكثر دقة وفهمًا أفضل لتأثير تغير المناخ على العالم تحت الماء.”
DOI: Nature Communications ، 2022. 10.1038 / s41467-022-33223-x (حول DOIs).

Social media junkie. Zombie fanatic. Travel fanatic. Music obsessed. Bacon expert.